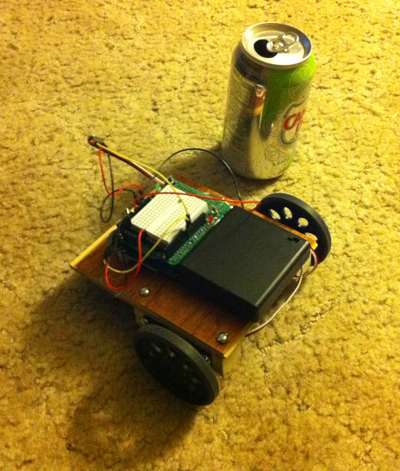
My cat-chasing robot
This is very early. The robot doesn’t yet have any sensors. It has two front wheels and a caster in the center back.
My plan is to put some thermal motion detectors on it and go towards the motion.
At the moment it just goes in squares. Forwards for a second and a half, then counter-rotate the wheels to make a rough 90-degree turn. Repeat.
Obviously, loose wires will need to be fastened, or cats will chew on them.