My cat-chasing robot now has sensors
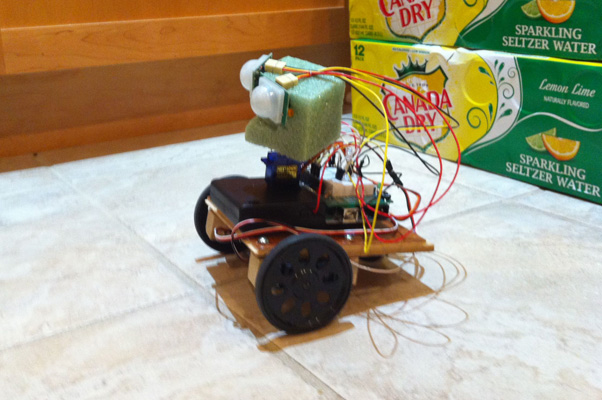
I now have sensors. They’re a bit lopsided, but they function. It’s worse that they’re a bit off-center. My code needs work. It tends to find a cat (or me) and then move forwards a bit, then start spinning.
I now have sensors. They’re a bit lopsided, but they function. It’s worse that they’re a bit off-center. My code needs work. It tends to find a cat (or me) and then move forwards a bit, then start spinning.