New robot pictures
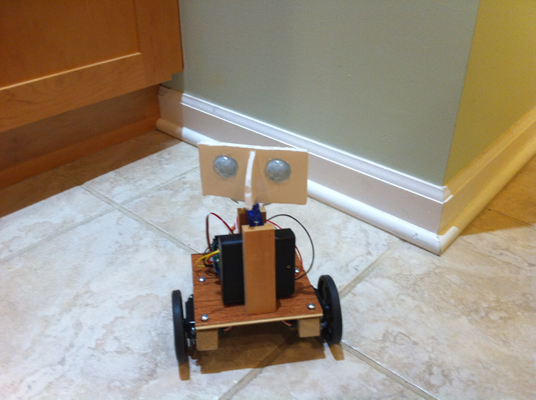
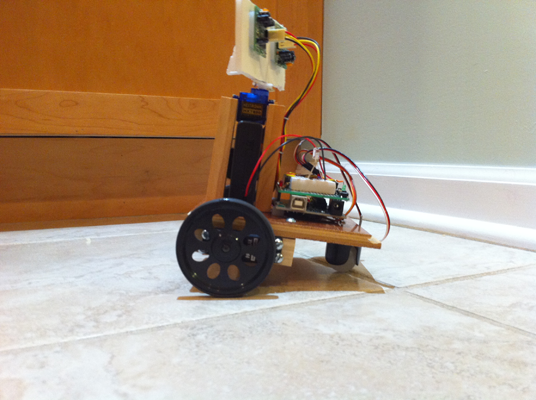
Here are some new robot pictures. I have a much better mount for the sensors now and they are working as well as they can. Unfortunately, I don’t think passive infrared motion sensors will work for what I want. They’re too erratic for use on a robot. They’d be fine for a stationary unit that needs to detect motion by “hot” objects such as a cat or a human and take some action. But for a moving object, they take too long to calibrate. They generate unreliable information.
I’ve ordered an ultrasonic rangefinder, which will look sort of Wall-E-ish. It should fit into the same “face”, but if not, it’ll be easy to make a new one.